CPU Scheduling in Operating Systems
- Short-term schedular
- Move processes from:
Ready Queue (Ready state)--> Running state - CPU scheduling can be of two types
Non-PreemptiveschedulingPreemptivescheduling
- Non-Preemptive scheduling
Has context switching but no time sharing- Once CPU has been allocated to a process, the process keeps the CPU until it releases CPU either by terminating or by switching to wait-state.
Starvation, as a process with long burst time may starve less burst time process.Low CPU utilization
- Preemptive scheduling
Has time sharing alongside of context switching- CPU is taken away from a process after time quantum expires along with terminating or switching to wait-state.
Less StarvationHigh CPU utilization
Goals of CPU scheduling
- Maximum CPU utilization
- Minimum Turnaround time (TAT).
- Min. Wait-time
- Min. response time.
- Max. throughput of system.
Terms
Throughput- No. of processes completed per unit time.
Arrival time (AT)- Time when process is arrived at the ready queue.
Burst time (BT)- The time required by the process for its execution.
Turnaround time (TAT)- Time taken from first time process enters ready state till it terminates.
- TAT = CT - AT or TAT = BT + WT
Wait time (WT)- Time process spends waiting for CPU.
- WT = TAT – BT
Response time- Time duration between process getting into ready queue and process getting CPU for the first time.
Completion Time (CT)- Time when the process gets terminated.
CPU Scheduling Algorithms
Who–> Short term schedulerWhere–> Ready to RunningWhen–> when the process moves from- Run
- Run –> Termination (process completes, take new)
- Run –> Wait (on I/O)
- Run –> Ready (on Quant-time)
- New –> Ready
- When high priority is created
- Wait –> Ready
- When high priority goes to Ready
- Run
Convoy Effect- It is a situation where
many processes, who need to use a resource for a short time,are blocked by one processholding that resource for a long time.
- It is a situation where
Aging- Aging is a technique of gradually increasing the priority of processes that wait in the system for a long time.
First Come First Serve (FCFS)
Simplest scheduling algorithmthat schedules according to arrival times of processes.- Criteria
- Arrival Time(AT)
- Mode
- Non-preemptive
- Cons
- High WT and Response time
- High
Convoy effect
Shortest Job First (SJF)
- Process with least BT will be dispatched to CPU first.
- Criteria
- Burst Time(BT)
- Mode
- Non-preemptive
- Preemptive SJF
- Shortest Remaining Time First (SRTF)
- Pros
- Min Avg WT and TAT
- Best among all scheduling algorithms
- Max throughput
- Min Avg WT and TAT
- Cons
- Estimation for BT(
impossible) for each process in ready queue beforehand, - May suffer from
convoy effect Process starvationmight happen if process with small BT is repeatly arriving and larger BT process is wating forever
- Estimation for BT(
- Estimation for BT
- Static
- Process size
- Process type
- Dynamic
- Simple averaging
- Exponential averaging
- Static
Shortest Remaining Time First (SRTF)
- It is
preemptive version of SJFPros- No convey effect
Longest Job First(LJF)
- Process having longest BT gets scheduled first
- Preemptive LJF
- Longest Remaining Time First (SRTF)
- Criteria
- Burst Time(BT)
- Mode
- Non-premptive
Longest Remaining Time First (SRTF)
- It is
preemptive version of LJF
Round Robin
- Round Robin is a CPU scheduling algorithm where each process is
cyclically assigned a fixed time slot - It is type of
preemptive version of FCFS - It’s one of the most widely used methods in CPU scheduling
- Criteria
- AT + time quantum(TQ)
- Pros
- Easy to implement
- No convoy effect
- Cons
- Move overhead, if context-switching is high(TQ is small)
Highest Response ratio next(HRRN)
- HRRN not only favours shorter jobs but also limits the WT of longer jobs
- Criteria
- Response ratio(RR) = (W + BT)/BT
- W: wating time for a process so far
- BT: Burst time of a procees
- Response ratio(RR) = (W + BT)/BT
- Mode
- Non preemptive
Priority Based scheduling
- Priority is assigned to a process when it is created
- Criteria
- AT + Priority
- Mode
- Preemptive and Non preemptive
- Pros
- Less complex
- Cons
Indefinite wating or Extreme starvation- If newly arrived process has high priority then process with low priority will be wating forever
- Types
Static priority- No Aging concept
Dynamic priority- Has Aging concept
- Extreme starvation can be solved by
Aging- i.e increase priority based on AT
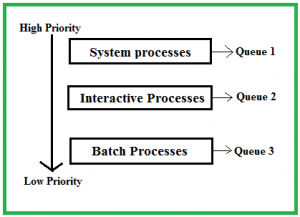
Multilevel Queue Scheduling (MLQ)
Ready queue is divided intomultiple queues depending upon priority- System process(SP) queue –> CPU process
- Interactive process(IP) queue –> Foreground process
- Batch process(BP) queue –> Background process
- Priority:
SP > IP > BP- i.e Only after completion SP, IP is executed and then BP
- Each queue has its
own scheduling algorithm- E.g: SP -> RR, IP -> RR & BP -> FCFS
Inter-queue movement not allowed- Cons
- Low priority process may suffer Starvation
- Low priority process may suffer Starvation
Multilevel Feedback Queue (MLFQ) Scheduling
- MLFQ CPU Scheduling is like MLQ Scheduling but in this process can move between the queues.
Inter-queue movement is allowed- It is more flexible
- It is the
most complex algorithm - Can be configured to match a specific system design requirement
- The parameters of the multilevel feedback queue scheduler are as follows:
- Scheduling algorithm for every queue
- No of queues
- Method to demoted to a lower-priority queue
- Method to upgraded to a higher-priority queue –> Aging
- Method to to determine in which queue the process will be pushed